Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators
Por um escritor misterioso
Descrição

Kinematic model of a spherical parallel manipulator: (a) general model;

Design and Analysis of a Spatial 3-DOF Parallel Manipulator with 2T1R-Type - Yanbin Zhang, Kwun-Lon Ting, 2013

Working principle. (a) Initial assembled position. (b) Lock of ball joint.
Robot Singularities: What Are They and How to Beat Them - RoboDK blog
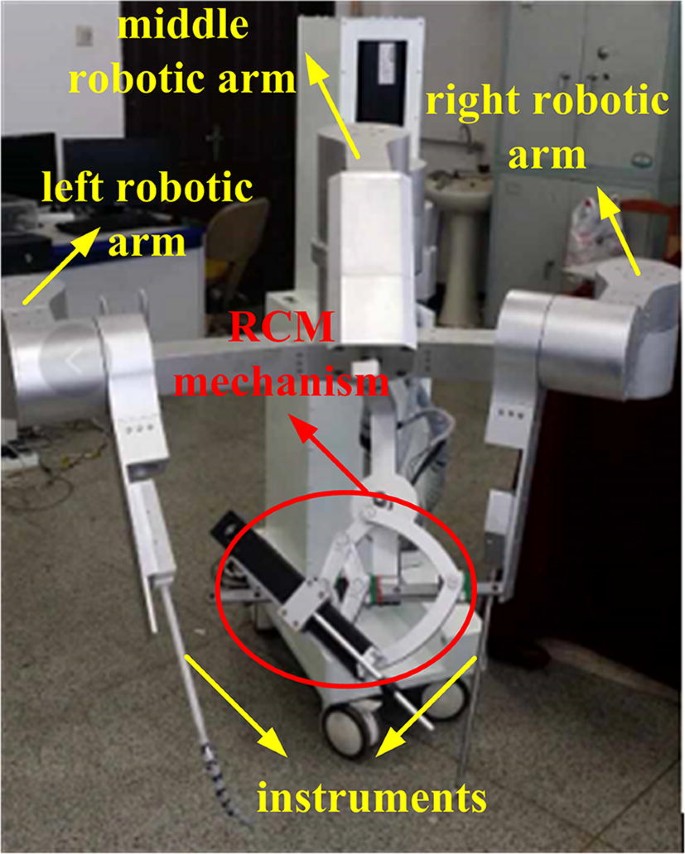
New remote centre of motion mechanism for robot-assisted minimally invasive surgery, BioMedical Engineering OnLine
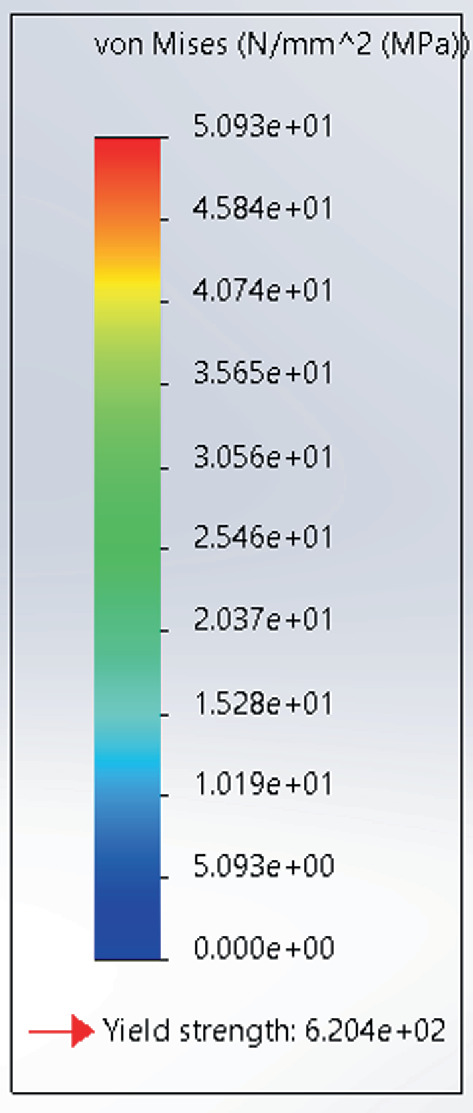
Design and Analysis of a Spherical Joint Mechanism for Robotic Manipulators

Comparison of 3-DOF asymmetrical spherical parallel manipulators with respect to motion/force transmission and stiffness - ScienceDirect

Parallel manipulator - Wikipedia
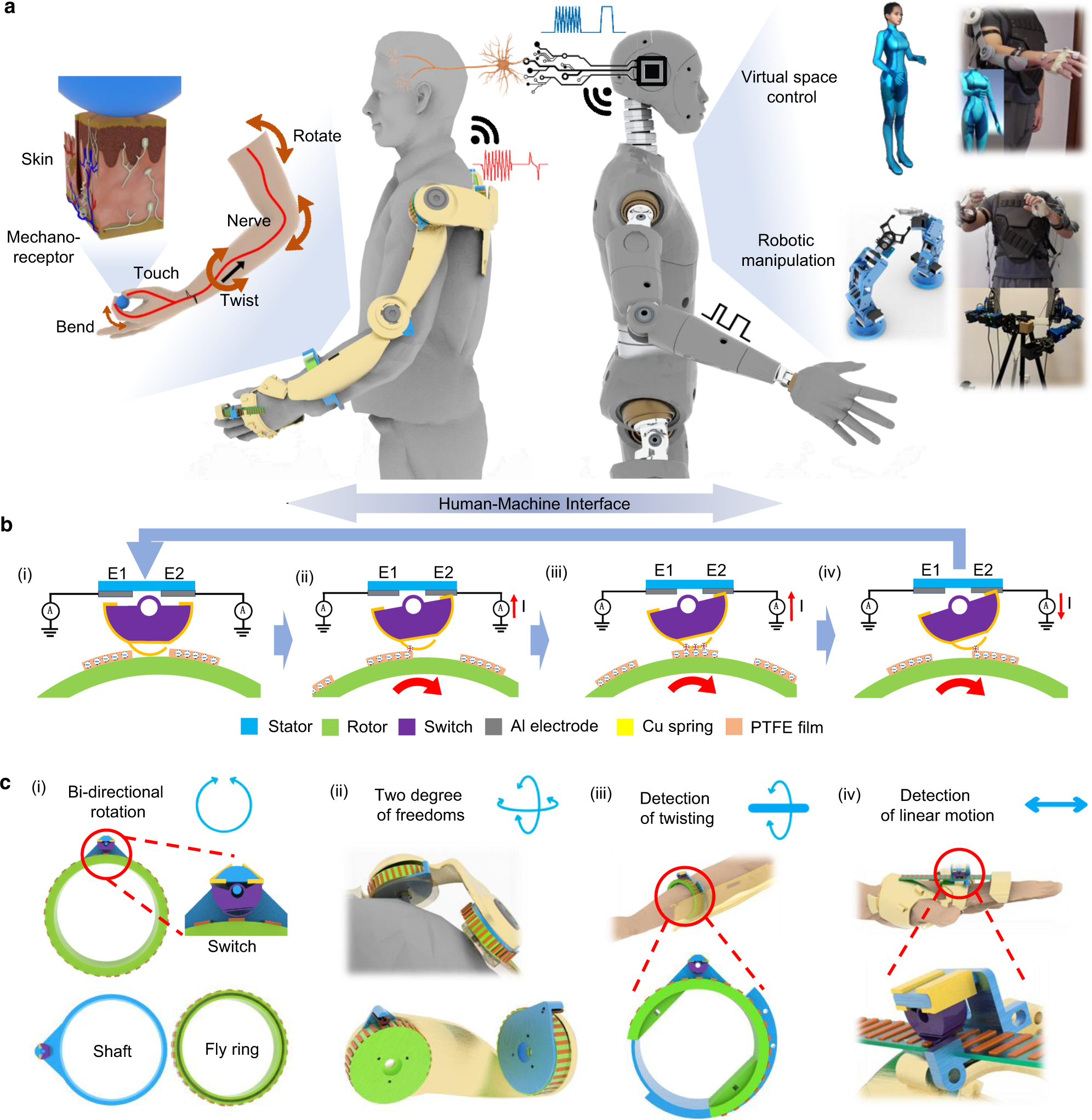
Low cost exoskeleton manipulator using bidirectional triboelectric sensors enhanced multiple degree of freedom sensory system
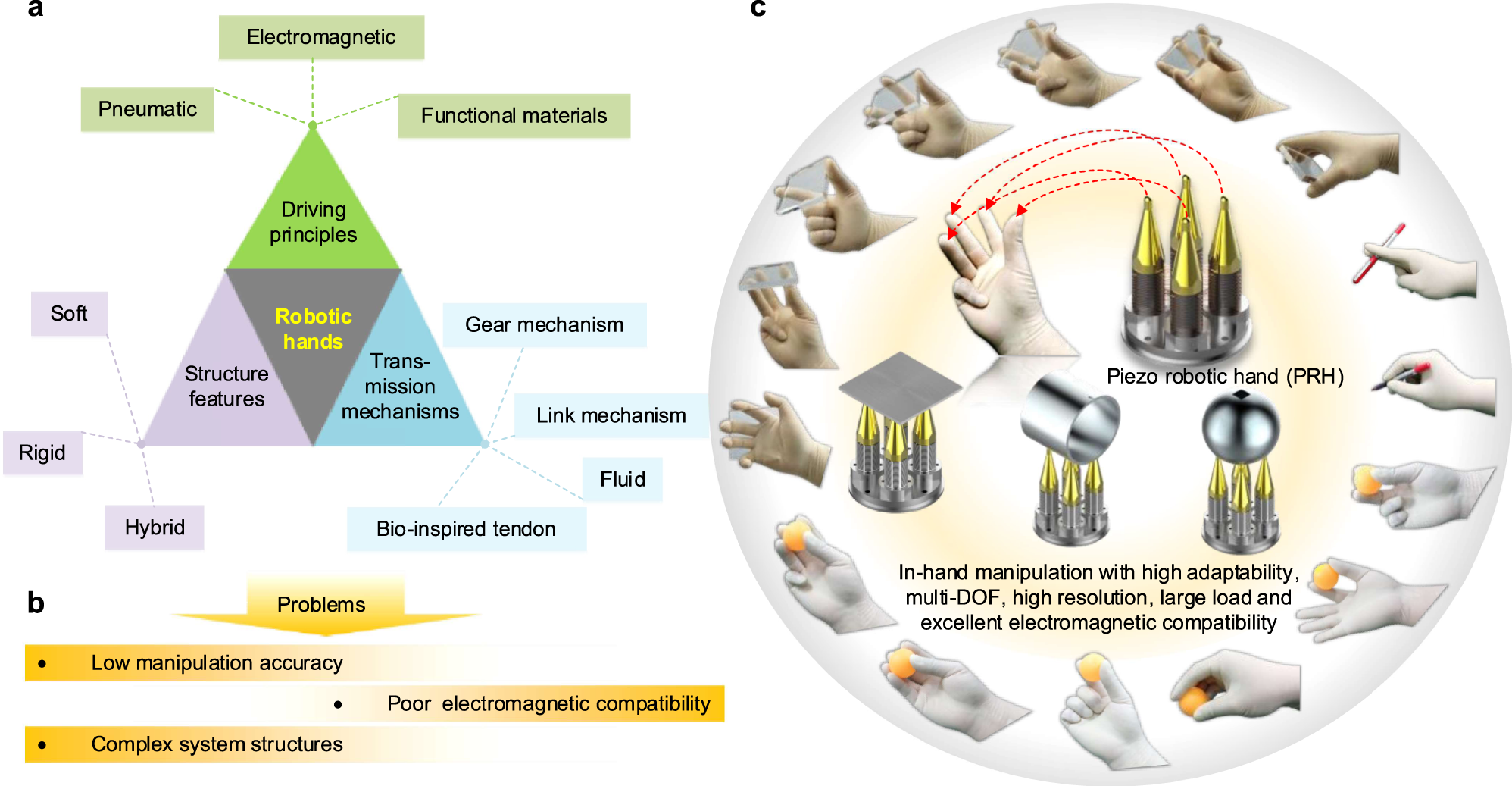
Piezo robotic hand for motion manipulation from micro to macro
de
por adulto (o preço varia de acordo com o tamanho do grupo)